1. FRAM-2014/15 objectives
The objectives of FRAM-2014/15 are two-fold; firstly science which builds on three international workshops (since 2008) on Arctic Ocean challenges in paleoclimate research, and secondly on testing new ice station logistics where the keywords are new technology, mobility and low operating costs.
The FRAM-2014/15 scientific objectives are to provide documentation for the past and present Arctic Ocean environment by acquiring new scientific data within the following disciplines:
- Sea bed geology: ( University of Bergen)
- o Geological sampling of older (pre-Neogene) sediments outcropping on steep slopes.
o Sediment coring for upper sediments (Multi-corer) for investigations of variations in the sea ice cover during warm periods within the last million years. (Bjerknes Centre)
o Seismic reflection measurements with 3.5 kHz Chirp echo sounder and 0.3 liter air gun. Sonobuoys and the camp hydrophone emulate a 3-D survey with 5 parallel seismic cables.
o One remote autonomous buoy for high resolution seismic reflection measurements reporting via Iridium.
o Six autonomous buoys for echo sounding spaced at 10 km interval and reporting via Iridium. ( WHOI/ Blodgett-Hall Polar Presence LLC)
o Heat flow measurements.
o Towed camera sled for bottom photography.
• Oceanography: (University of Bergen/NERSC)
- o Acoustic Doppler Current Profiler (ADCP), 0- 500 m depth.
o Aanderaa current meters suspended at 3 deeper levels in the water column.
o Thermistor string 0-300 m depth.
o Probe for ocean microstructure and turbulence measurements.
o CTD measurements of temperature and salinity from surface to bottom at regular intervals.
o 200 kHz echo sounder for monitoring of deep scattering layer.
• Ice: (NERSC/ University of Bergen)
- o Thermistor string in the ice for recording of ice growth.
o EM- ice thickness and snow observations repeated over a 100 sq.km grid at regular intervals through one annual cycle.
o Ice deformation grid monitored by GPS trackers.
• Meteorology: (Norwegian Meteorological Inst/Univ. of Bergen.)
- o Measurement of incoming and outgoing long and short wave radiation through one annual cycle.
o Automatic weather station.
2. The expedition plan
A. Wegener Institute of Polar and Marine Research (AWI) is staging a geo-expedition with its research icebreaker Polarstern to the Alpha-Mendeleev Ridge, Central Arctic Ocean, to obtain Mesozoic sediments by trying to visit locations sampled from ice drift station T-3 in the late 1960-ies (Fig. 1 and 2). A previous attempt made by Polarstern in 1998 included a Russian nuclear icebreaker. The area has never been accessible to ships due to thick multi-year ice. Cooperation with the hovercraft may increase the possibilities of reaching target localities (dark dots, Fig. 2)
Our past experience makes two considerations essential for our strategy;
- in thick ice, all site surveys have to be done in ice drift mode and this takes time.
- driving conditions (visibility) is critical for operational efficiency;
The Polarstern expedition will take place in the late fall where the typical weather situation is low compact cloud cover and “white-out” conditions which may impact efficient use of the hovercraft. Also, site survey operations in thick multi-year ice are only possible in ice drift mode. The plan is therefore:
| Phase 1 | German-Norwegian joint operation Aug. – September 2014 Polarstern transports the hovercraft and supplies to the work area on the Alpha Ridge. Here the hovercraft will operate as an auxiliary workboat for Polarstern’s science program, attempt geological coring and deploy seismic recorders. |
| Phase 2 | Norwegian ice drift station. September 2014 to end of 2015? Polarstern departs and leaves behind the hovercraft with a crew of two and supplies for 18 months. The drift during the following +4 months will be over the target area for Cretaceous sediments. Later the drift will cross the Lomonosov Ridge (Fig. 1). Change of personnel by DC-3 out of Resolute, Canada will take place in the time window middle of March- end of April 2015. In due time, the intent is to obtain permission from the Norwegian Coast Guard vessel for assistance of K/V Svalbard to recover the hovercraft, its equipment and scientific sample material in the Fram Strait south of 84° N possibly at the end of 2015. |
The location for Polarstern to off-load the supplies and equipment for the ice drift will be a trade-off between the desire to have an anticipated drift track over the region of disturbed seabed (asteroid impact area) and the need to avoid a drift path which diverts westwards into the large scale Beaufort Gyre. Equipment and fuel offloaded from the icebreaker will immediately be moved to a floe of multi-year ice considered suitable as a base camp for the duration of the drift. At this site, we will construct a “hangar” to house the hovercraft and serve as an enclosed work space. The hangar is formed by three adjoining 3 meter high walls of ice/snow covered by a tarp on top and one at the open end. Similar enclosures will be made to protect the fuel pillows which will be stored at two or three nearby locations.
Whenever interesting targets appear in the seismic records, it may be necessary to return upstream for repeated coring of promising sampling locations. This will require excursions up to 50-100 km away from the base if driving conditions permit.
3. The scientific challenges
3.1 Geology
3.1.1 Background
The profound change in the global environment of Planet Earth before about 50 million years ago is described as a change from a warm “greenhouse world” to our present “ice-house world”. During the “greenhouse” state, sea surface temperatures in the Arctic Ocean were about 10 degrees warmer than today (Jenkyns et al., 2004) and CO2 levels 2-3 times present levels (Berling and Royer, 2011). The marine sediment record of this period is covered by glacially derived sediment deposits on the circum-polar continental margins and younger sediments in the deep polar basin. Only two areas in the entire Arctic Ocean (except Chuckhi Plateau) have known exposures of Mesozoic (older than 65 million years) sediments at the seabed. These areas are:
- Cretaceous sediments on Alpha Ridge accessible in certain locations in a 200 x 600 km area characterized by massive submarine slides and places where the upper sediments (>200 m) have been “blown” away (Fig. 2). As of today, this area is not accessible by icebreakers;
- The northern margin of the Barents Sea during the Mesozoic is represented by the Alaska facing slope of the Lomonosov Ridge.
No icebreaker expedition has yet made a single attempt at offset stratigraphic sampling of known localities in the central Arctic Ocean to expand our knowledge of the Mesozoic paleoenvironment.
3.1.2 The geophysical and geological data base
The data bases for seismic reflection measurements and stratigraphic representation of the sediment record in the Arctic Ocean are shown in Appendix 1. The stratigraphic information consists of the results for scientific drilling (ACEX) in 2004 on Lomonosov Ridge together with more than 700 short sediment cores recovered by gravity corer, most of them 3 meter, a few over 10 meters long. Stratigraphic representation from almost half of theTertiary is missing due to two hiatuses at the ACEX site. Information from the Mesozoic is limited to 1.4 meter of Campanian, dark claey-mud and silty sand at the base of the ACEX core and four short ( 3 meter long) cores which accidentally captured a slump deposit containing Late Cretaceous sediments. One of these cores (FL-533, Fig. 1) has a 0.65 meter interval of black mud with a content of 10-14% total organic carbon.
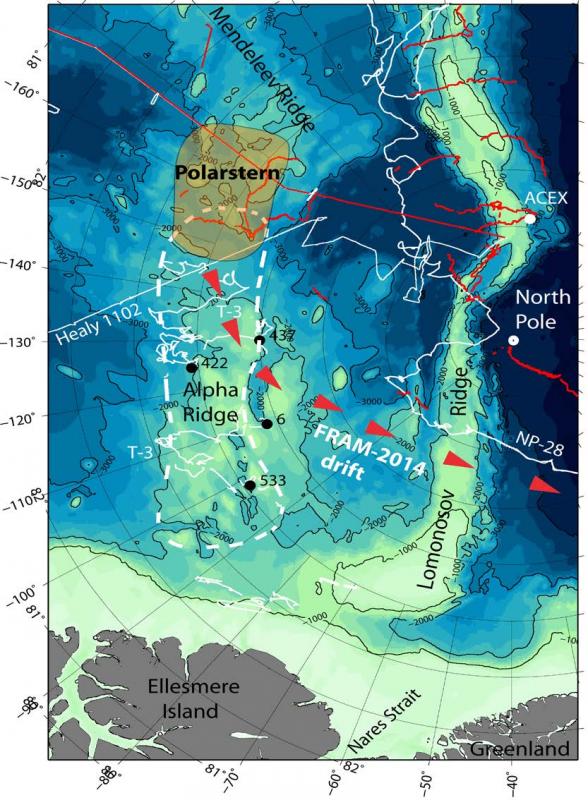
Fig. 2. The area within the white dashed line is characterized by erosion, disturbed sediments at the sea bed and massive submarine slides. These events are interpreted to have been caused by a pressure wave from impacts of asteroid fragments 2-3 million years ago (Kristoffersen et al., 2008). Black dots are locations of cores with Cretaceous sediments occurring in slump deposits. Red lines denote track lines of icebreakers and white lines are seismic data collected from ice drift stations (except the straight line of Healy 1102).
3.1.3 Scientific community interest
Sediment sampling by IODP drilling on the Lomonosov Ridge in 2004 was carried out with a “Mission Specific Platform” consisting of one nuclear and one diesel-driven icebreaker for ice management and an ice-going drill ship, the Vidar Viking. The cost was $ 11 million.
The continued interest of the international scientific community to acquire samples of Mesozoic sediments by new scientific drilling in the Arctic Ocean has been documented in a series of workshop listed below;
Investigation Arctic Ocean History: From Speculation to Reality –
A workshop to prepare for Arctic Ocean scientific drilling
Bremen, 23-25 September 2009 584 participants
IODP New Ventures in Exploring Scientific Targets
Copenhagen, 1-3 Nov. 2011 34 participants
Overcoming Barriers for Arctic Ocean Drilling: the Site Survey Challenge
The number of active proposals for scientific drilling is shown in Appendix 2.
3.2 The sea ice cover during warm periods within the last million year
Ice cores from the Greenland Ice Sheet (GIS) show clear evidence of past abrupt warm events with up to 15 degrees warming in less than a decade. At present, both Arctic sea ice and the GIS are undergoing strong transformations. Backed by a European Research Council Synergy Grant, 4 teams from three Nordic research centers of excellence have joined forces to explore the hypothesis that “the Arctic and sub-Arctic sea ice cover exerts important controls on past and future Greenland temperature and ice sheet variations”.
3.3 Oceanography
Vertical mixing in the upper water column is of crucial importance for the regional as well as the large scale ice cover and heat budget through its effect on the vertical heat transport from the warm Atlantic-derived waters up towards the overlaying ice. The near-inertial interior response of the ice-covered waters, in terms of internal waves, and the pathways to turbulence and mixing are largely unknown. Furthermore, flow of tidal currents over topographic features might enhance the internal wave energy, leading to vertical mixing. The FRAM-2014/15 platform offers a unique opportunity for ground-breaking oceanographic sampling for studies of the internal wave climate, the background currents, temperature and the parameters for estimating turbulence.
3.4 The sea ice mass budget over an annual cycle
The sea ice thickness is determined by the surface heat budget, snow depth, thermodynamic ice growth and melt rates, ice convergence/divergence, and the thermal state of the halocline. The mobility of the hovercraft equipped with EM-instrumentation for repeated continuous ice thickness measurements, an array of GPS data loggers for monitoring of ice deformation combined with base station observations of radiative fluxes, and the temperature structure of the halocline provide the first unique opportunity for direct monitoring of the sea ice mass budget within a 100 square kilometer area throughout the annual cycle.
3.4 The surface radiation budget
Development and validation of remote sensing algorithms within the EUMETSAT Ocean and Sea Ice SAF (OSISAF, see http://osisaf.met.no/p/) are important issues for enhancing the quality of information derived from satellites. OSISAF is generating Sea Surface Temperature (SST) and Surface Radiative Fluxes (incoming shortwave and longwave) using optical satellite sensors. Current products cover only open ocean conditions, but there is a demand for such information from the ice covered Arctic as well as for complementing SST with ice temperature. Knowledge of the temporal evolution of these parameters in the Central Arctic Ocean and the marginal ice zone is sparse as is the collocation of such measurements with satellite passages.
4. The field strategy
4.1.1 Alpha Ridge (Dept. of Earth Science, Univ. of Bergen)
The greatest advance in better understanding of the geological evolution of the Arctic Ocean has to come from more target-oriented stratigraphic sampling and not from more seismic reflection surveys. Kristoffersen et al. (2008) have documented that the “accidental” recovery of Cretaceous sediments on Alpha Ridge with short gravity corers were within a 200 km x 600 km area (Fig. 2) characterized by:
- Massive sub-marine slides;
- Isolated hills with steep slopes where the adjacent stratigraphy appears to have been “blown away” and
- Locally deformed sediments present at the seabed with the degree of deformation decreasing down-section.
The area has so far not been accessible to research icebreakers. Everywhere else in the Arctic Ocean, the upper 200 m of sub-bottom sediments form an undisturbed drape of hemi-
pelagic sediments. This makes the disturbed area enclosed by the white dashed line in Fig. 2 the most promising area in the Arctic Ocean for easy access to Mesozoic sediments with conventional sediment coring technology.
Action:
Guided by the available seismic data, search for optimum localities on slopes for systematic sediment sampling in order to:
- Provide ground truth for more detailed documentation of the paleoceanography and depositional environment in the basin north of the Mesozoic Barents continental margin. Potential sampling localities are based on ice drift station T-3 seismic data. Other localities will be determined by supplementary seismic surveys in ice drift mode.
Equipment:
The hovercraft (Fig. 3) has Knudsen 3.5 and 12 kHz echo sounders which may give up to more than one hundred meters of penetration in hemi-pelagic sediments in 2000 meter water depths. The 0.3 litre airgun will be fired at 25 meter intervals and provides more than 1 km of penetration in these water depths. 3-D seismic data acquisition will be attempted using four sonobuoys and the camp hydrophone to emulate five parallel streamers. Another seismic line will be acquired at a remote location by an autonomous seismic sparker buoy reporting via Iridium satellite.
Sediment sampling will be carried out with a patented hydrostatic corer (Fig. 4) where the core barrel is fired into the seabed like a projectile (Norw. patent no. 323149 to the PI). The driving force is generated by the difference between ambient water pressure and atmospheric pressure at the surface at the time of deployment. The set-up includes a hydraulic winch (0.4 ton) and 3000 meter Kevlar line (2.8 ton breaking strength) and corer with a 3 or 6 m long barrel. The need for winch capacity is dramatically reduced as the Kevlar line is neutrally buoyant and the ice drift provides the necessary force for pulling the corer out of the seabed.
A towed camera sled will be used to obtain video footage of bottom conditions.
An array of six prototype autonomous echo sounding buoys reporting via Iridium satellite, will be deployed at 10 km intervals away from the base camp to obtain improved definition of the submarine topography over a wide (>50 km) swath along the drift path.
4.1.2 The Lomonosov Ridge slope facing Alaska (Dept. of Earth Sci., Univ. of Bergen)
The Mesozoic northern margin of the Barents Sea is today represented by the slope of Lomonosov Ridge facing the Amerasia Basin. The tectonic evolution of the Amerasia Basin is controversial because no fossil plate boundary has been convincingly documented and many models have been proposed. Lawver and Scotese (1990) group these models into three
classes where the alternatives for the Mesozoic Barents Sea are a passive rift margin or a sheared margin.
Action:
Sample pre-Cenozoic sediments on the slope of Lomonosov Ridge to:
- Seek evidence for how long the Amerasia Basin has existed;
- Search for sediments which can document the Late Mesozoic – Early Cenozoic history of the margin. Albian to Paleocene strata are missing on northern Svalbard, but most likely represented on the slope of the Lomonosov Ridge
Equipment:
Seismic reflection measurements and sediment sampling by hydrostatic corer as above. Rock dredging may be an alternative approach.
4.1.3 The sea ice cover during warm periods within the last million year (Bjerknes Centre)
The possible connection between the state of the Greenland Ice Sheet and the extent of the Arctic and sub-Arctic sea ice cover will be investigated by the Nordic research teams by describing the nature, timing and extent of abrupt events across climate archives under different boundary conditions. Another priority is gaining new insight into the mechanisms behind the sudden demise of the sea ice cover.
Action:
Sample the upper meter of sediments along a transect north of Greenland to:
- Obtain material for documenting variations in the extent of the sea ice cover.
Equipment:
Gravity corer with shutter mechanism instead of core catcher to obtain undisturbed near surficial sediments.
4.2 The water mass (Geophys. Inst, Univ. of Bergen)
The estimated drift of FRAM-2014/15 will cross the basin between the Alpha- and Lomonosov ridges (87N), and then cross the Lomonosov Ridge. The track covers a severely under-sampled region of the Arctic Ocean where oceanographic conditions are known only in a general sense.
Action:
Contribute to:
- general sampling of the hydrography and currents to increase our understanding of the Arctic Ocean circulation, and
- to sample vertical mixing processes in the deep basin and in relatively shallow waters over topography (Lomonosov Ridge).
Equipment:
Acoustic Doppler Current Profiler measurements 0- 500 m depth and Aanderaa current meters suspended at 3 deeper levels in the water column. Halocline structure will be monitored by a thermistor string in 0-300 m depth. A probe for ocean microstructure and turbulence measurements will be lowered at intervals and CTD measurements made of temperature and salinity structure from the surface to the sea bed .
A 200 kHz echo sounder will be used to record deep scattering layers within the upper few hundred meters and an underwater camera used to scan the appropriate depth intervals for visual documentation of scatterers.
4.3 Sea ice (NERSC/Geophys. Inst., Univ. of Bergen)
Action:
The intent is to monitor changes in the state of the ice cover through a complete annual cycle within a 100 sq. km area centered on the ice camp.
Equipment:
A network of stakes equipped with GPS data loggers at the corners will serve as markers for transects to be repeated at regular intervals through the year. An EM-probe mounted on the front of the hovercraft provides direct underway estimates of ice thickness and other observations include; snow depth and snow type, ice thickness calibration by drilling, ridge and lead frequencies. A video camera mounted on a 13 m high mast on the hovercraft makes it possible to obtain time lapse photography of ice surface conditions out to 2 km from the main camp in all directions. Ice growth will be monitored by a thermistor string within and below the ice. Time lapse photography of the underside of the ice will be made by an underwater camera.
4.4 Surface radiation fluxes over an annual cycle (Norwegian Meteorological Inst.)
The observations to be performed by METNO are 4 component irradiance measurements at the surface (in-, outgoing, short-, longwave), sunshine duration and infrared measurements of the brightness temperature of the surface as well as the atmosphere. Instrument setup is complemented with GPS and tilt measurements. Those radiation measurements will be complemented by data from an automatic weather station (AWS) provided by the Geophysical Institute at the University of Bergen (GFI/UoB). The AWS will provide the basic meteorological parameters of temperature, humidity, wind speed and wind direction with a temporal resolution of 10 minutes.
Action and equipment:
Operation of a Campbell CR-1000-based station for logging of air and surface temperature, the radiation effects of direct and reflected short- and long wave radiation, sun time, slant angle and GPS-positioning.
5. The research platform
The platform
The expedition will be carried out using the research hovercraft Sabvabaa (Inuit for …”flows swiftly over it”) in a joint operation with the German research icebreaker Polarstern (Fig. 3). The underlying vision for use of the hovercraft in the Arctic Ocean is to explore alternative, low cost logistic solutions for research projects which do not require heavy equipment (Hall and Kristoffersen, 2009; Kristoffersen and Hall, 2014). The background and activity to date is detailed on the web-site: www.polarhovercraft.no . The hovercraft is owned by Blodgett-Hall Polar Presence LLC and registered in the state of Delaware, United States (DL 1519 AB). The owner, Dr. John K. Hall (retired), Geological Survey of Israel was instrumental in collecting the legacy seismic data from ice drift station T-3 in 1966-70 for his graduate studies, now to be used as a guide for sampling of Cretaceous sediments. Hovercraft operation and equipment development is carried out by Professor Yngve Kristoffersen, Department of Earth Science, Univ. of Bergen and Nansen Environmental and Remote Sensing Centre. Field operations in 2008-2009 during the International Polar Year were funded by the Norwegian Research Council and subsequent cruises for geological sampling on the Yermak Plateau 2009-2011 by the Norwegian Petroleum Directorate. The FRAM-2012 expedition was also funded by the Norwegian Petroleum Directorate.
A hovercraft moves over sea ice independent of ice thickness or ice pressure. The effective hover height is 0.5 meter with full payload. Max. payload is 3 ton (fuel and equipment). The FRAM-2012 expedition provided valuable experience relevant to long transits and joint icebreaker operations (Kristoffersen and Hall, 2014). Progress over first year ice is equal to that of an icebreaker, but the critical factors are visibility and avoidance of larger areas of ice rubble.

Fig. 3 . The hovercraft and some of its equipment. Not shown is the front mounted EM-probe for underway ice thickness measurements.
The hovercraft is fully equipped as a research vessel with capability for seismic reflection measurements and geological sampling (Fig.3). Since weight is an issue, all equipment and field methods are specially developed for the hovercraft (Fig. 4). All data is acquired in ice drift mode with the hovercraft parked on the ice. The fuel capacity (2400 litre) is sufficient for work up to 200 kilometer away from the icebreaker and return.

Fig. 4 Tools for sediment sampling and sea ice drilling developed for the hovercraft.